

Laboratory of Bio-Mechatronics



概要
生体メカトロニクス研究室では、メカトロニクスや人工知能、人の運動の知識をベースに、振動解析と制御、農業機械、ロボット工学、冬季スポーツ工学などの幅広い分野の研究を行っています。例えば、農業機械の性能向上の妨げとなる振動の問題に対して、ダイナミクスを重視した振動制御の研究を行っています。更に、日本の農業人口の減少と高齢化に対して、機械工学や人工知能、ロボット技術で農業を支える研究も行っています。また、日本のスキー選手の国際大会での活躍をサポートするために、日本人の骨格的特徴に適したスキーブーツの設計や選手のスキル解析に関する研究も行っています。学生の教育では、全日本ママチャリ耐久レースやロボット・トライアスロンなどの大会に参加し、学生がこれらの経験を通じて成長し、将来の技術者として活躍するための教育にも力を入れています。
 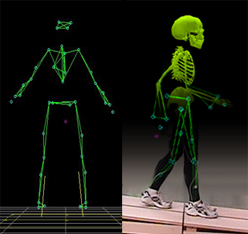 |
当研究室では「アグリマシン・ダイナミクス」と「バイオモーション・ダイナミクス」をテーマに教育・研究活動を展開しています。 「アグリマシン・ダイナミクス」では、GPSやロボット技術の応用による農業機械のロボット化・効率化に加え、新しい収穫機などの農業用作業機・食品加工用ロボットの開発など、最先端技術の導入にとらわれない幅広い視点に重点を置いた農業用機械の高性能・高効率化の研究を行っています。 「バイオモーション・ダイナミクス」では、人の動作解析結果を、ロボットや福祉・医療機器、スポーツ用具などの設計開発へ応用します。モーションキャプチャシステムや筋電計、床反力計、高速度カメラなどの生体計測機器を用いて受動関節の運動に着目した研究を行っています。 |
|||||||||
|
「運動・振動のアクティブ制御」や「ロボット技術」の農業への応用 Application Motion and vibration control of mechanical systems to agriculture – Link* |
||||||||||
 |
||||||||||
|
|
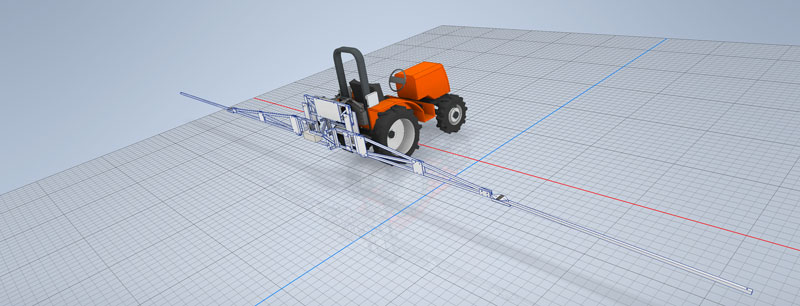
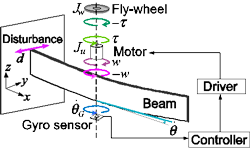
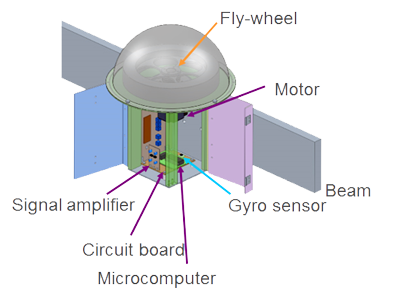
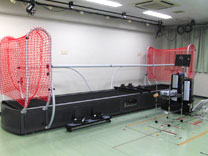
機械システムは高性能化のために軽量化・高速化が進められています。これに伴い、これまで問題とならなかった振動の影響が大きくなり、機械システムの性能向上の妨げとなっています。 そこで、ダイナミクスを重視した動力学モデルの構築と、運動ならびに振動制御の研究を行い、さらなる性能向上を目指します。 農業は北海道北見地域の主力な産業であり、かつてハッカの世界有数の産地として知られていました。最盛期には世界市場の7割を占める産地でした。現在、北見地域を含むオホーツク地域は、玉ねぎをはじめ、小麦、馬鈴薯、ビート、カボチャ等の日本有数の産地であるだけでなく、酪農、畜産についても国内でも主要な産地となっています。この地域の特色は、広大かつ起伏に富み、複雑に入り組んだ丘陵地での大規模農業が盛んであり、北海道十勝地方のような大規模農業地域と一線を画しています。 しかし、高齢化、労働力不足が顕在化しつつあり、今後ますます進行すると予想されています。省力化・自動化による生産性向上や高品質化に対する工学的な支援が必要とされています。生体メカトロニクス研究室では、北海道農業つまりは日本の食料生産の一翼を担うオホーツク地域で地域農業協同組合や農業生産法人等との連携や課題発掘を進め、研究室が持つ機械化・自動化・ロボット化技術、AI技術、ICT技術を基にした解決策の研究と技術の実用化による高品質化・高効率化に取り組んでいます。 |
|||||||||
| カボチャ皮むきロボットの開発* | ||||||||||
|
||||||||||
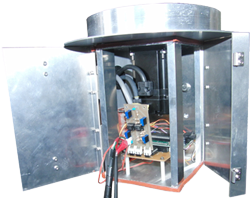
| Active Wheel Damper (AWD)(非制御時) (*youtube) | Active Wheel Damper (AWD)(制御時) (*youtube) | |||||||||
| Active Wheel Damper(AWD)を用いた柔軟構造物の振動制御効果(過渡応答)* | ||||||||||
| Active Wheel Damper (AWD)(非制御時,風による強制加振) (*youtube) | Active Wheel Damper (AWD)(制御時,風による強制加振) (*youtube) | |||||||||
| Active Wheel Damper(AWD)を用いた柔軟構造物の振動制御効果(強制加振による定常応答)* | ||||||||||
|
「アルペンスキー競技のスキル解析」と「骨格的特徴に基づくスキーブーツ設計」 Skill analysis system for alpine ski racers and Design of a ski boot based on characteristics of leg frame of a skier – Link* |
||||||||||
 3DCAD モデルマッチング手法* |
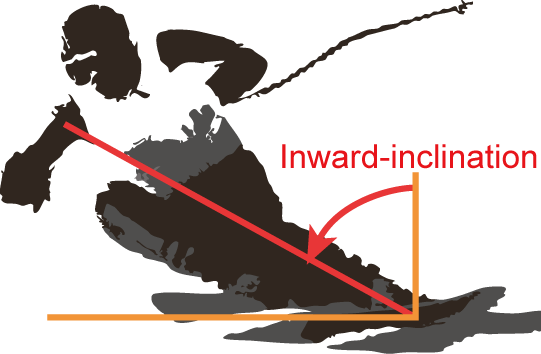
現在、スキー人口の減少などにより、倒産や閉鎖を余儀なくされるスキー場が跡を絶たず、積雪地域の経済的問題となっています。日本人選手の国際大会での活躍はスキー人口増加の促進につながり、積雪地域の経済活性化に繋がると考えられます。日本人選手の国際大会での活躍をめざし、アルペンスキー選手のスキル解析に加えて新しいスキル解析システムの開発・日本人の骨格的特徴に基づいた、スキーブーツの設計に関する研究を行っています。 競技タイムの短縮には、素早い内傾動作と内傾角度の維持が欠かせない要因であることを突き止め、高速な内傾動作が可能なスキーブーツを設計・開発しています。 動画は3DCAD モデルマッチング手法*によるトップレベルアルペンスキー選手のスキル解析の一例です。2次元の放映映像から3次元の関節位置や角度の数値を得るモーション解析を行うことが可能な手法であり、現時点では手作業による3DCADモデルのマッチング作業を行っていますが、AIによる自動化手法の研究を進めています。 |
|||||||||

星野 洋平 教授 | Yohei Hoshino (Professor)

楊 亮亮 准教授 | Liangliang Yang (Associate Professor)
博士後期課程 共創工学専攻
Doctoral Program
谷内 勇介 | TANIUCHI Yusuke
THATREESOPHON EKKORN | タートゥリーソーポン エッコーン from タイ (2024年度秋入学)
博士前期課程 機械電気工学プログラム
Master’s Program, Mechanical-Electrical Engineering Program
大坂 周平 | OSAKA Shuhei
村山 芽依 | MURAYAMA Mei
笹谷 昌汰 | SASAYA Shota
富岡 千晶 | TOMIOKA Chiaki
鎌田 颯太 | KAMATA Sota
瀬川 朋哉 | SEGAWA Tomoya
Guardado Sol, Diego Ernesto | ディエゴ from エルサルバドル
Kshitij Ansingkar | シティジ from インド
十亀 航輝 | SOGAME Koki
岩月 聖宗 | IWATSUKI Masamune
田中 柚 | TANAKA Yuzu
稲場 捷紀 | INABA Toshiki
劉 家辰 | LIU JIACHEN, リュウ カシン from 中国
Gao Wenzhong | コウ ブンシュウ from 中国
学士課程
Undergraduate Program
機械知能・生体工学コース/エネルギー総合工学コース/地域マネジメント工学コース
Intelligent Machines and Biomechanics Course / Applied Energy Course / Regional Management Engineering Course
小川 和皐 | OGAWA Kazusa
佐藤 伶哉 | SATO Ryoya
大門 陽紀 | DAIMON Haruki
立花 昂誠 | TACHIBANA Kosei
Min Kijun | ミン キジュン from 韓国
甲地 亮太 | KATSUCHI Ryota
相良 光星 | SAGARA Kosei
大谷 健人 | OTANI Kento
笹嶋 竜吉 | SASAJIMA Tatsuyoshi
中田 理貴 | NAKATA Masaki
矢野 稜人 | YANO Ryoto
谷 一樹 | Tani Kazuki
DAGVASUREN GUNDALAI | ダグバスレン グンダライ from モンゴル
研究生
Research Student
Yang Haojun | ヨウ コウキン from 中国
| 最近の研究テーマ | ||||||||||
|
「運動・振動のアクティブ制御」や「ロボット技術」の農業への応用 Application Motion and vibration control of mechanical systems to agriculture – Link* |
||||||||||
|
||||||||||
|
|
機械システムは高性能化のために軽量化・高速化が進められています。これに伴い、これまで問題とならなかった振動の影響が大きくなり、機械システムの性能向上の妨げとなっています。 そこで、ダイナミクスを重視した動力学モデルの構築と、運動ならびに振動制御の研究を行い、さらなる性能向上を目指します。 農業は北海道北見地域の主力な産業であり、かつてハッカの世界有数の産地として知られていました。最盛期には世界市場の7割を占める産地でした。現在、北見地域を含むオホーツク地域は、玉ねぎをはじめ、小麦、馬鈴薯、ビート、カボチャ等の日本有数の産地であるだけでなく、酪農、畜産についても国内でも主要な産地となっています。この地域の特色は、広大かつ起伏に富み、複雑に入り組んだ丘陵地での大規模農業が盛んであり、北海道十勝地方のような大規模農業地域と一線を画しています。 しかし、高齢化、労働力不足が顕在化しつつあり、今後ますます進行すると予想されています。省力化・自動化による生産性向上や高品質化に対する工学的な支援が必要とされています。生体メカトロニクス研究室では、北海道農業つまりは日本の食料生産の一翼を担うオホーツク地域で地域農業協同組合や農業生産法人等との連携や課題発掘を進め、研究室が持つ機械化・自動化・ロボット化技術、AI技術、ICT技術を基にした解決策の研究と技術の実用化による高品質化・高効率化に取り組んでいます。 |
|||||||||
| カボチャ皮むきロボットの開発* | ||||||||||
|
||||||||||
| Active Wheel Damper (AWD)(非制御時) (*youtube) | Active Wheel Damper (AWD)(制御時) (*youtube) | |||||||||
| Active Wheel Damper(AWD)を用いた柔軟構造物の振動制御効果(過渡応答)* | ||||||||||
| Active Wheel Damper (AWD)(非制御時,風による強制加振) (*youtube) | Active Wheel Damper (AWD)(制御時,風による強制加振) (*youtube) | |||||||||
| Active Wheel Damper(AWD)を用いた柔軟構造物の振動制御効果(強制加振による定常応答)* | ||||||||||
|
「アルペンスキー競技のスキル解析」と「骨格的特徴に基づくスキーブーツ設計」 Skill analysis system for alpine ski racers and Design of a ski boot based on characteristics of leg frame of a skier – Link* |
||||||||||
3DCAD モデルマッチング手法* |
現在、スキー人口の減少などにより、倒産や閉鎖を余儀なくされるスキー場が跡を絶たず、積雪地域の経済的問題となっています。日本人選手の国際大会での活躍はスキー人口増加の促進につながり、積雪地域の経済活性化に繋がると考えられます。日本人選手の国際大会での活躍をめざし、アルペンスキー選手のスキル解析に加えて新しいスキル解析システムの開発・日本人の骨格的特徴に基づいた、スキーブーツの設計に関する研究を行っています。 競技タイムの短縮には、素早い内傾動作と内傾角度の維持が欠かせない要因であることを突き止め、高速な内傾動作が可能なスキーブーツを設計・開発しています。 動画は3DCAD モデルマッチング手法*によるトップレベルアルペンスキー選手のスキル解析の一例です。2次元の放映映像から3次元の関節位置や角度の数値を得るモーション解析を行うことが可能な手法であり、現時点では手作業による3DCADモデルのマッチング作業を行っていますが、AIによる自動化手法の研究を進めています。 |
|||||||||
過去の論文について研究者総覧をご覧ください | Please refer to Researcher Database for other publications
星野洋平:研究者総覧Researcher DatabaseResearchmapResearchGate本人業績一覧
—–
生体メカトロニクス研究室の
最近の研究成果
(2025)
-
- Research on EV Crawler-Type Soil Sample Robot Using GNSS Information : Liangliang YANG*, Chiaki TOMIOKA, Yohei HOSHINO, Sota KAMATA, Shunsuke KIKUCHI, MDPI Sensors (IF(2023)=3.4), (2025-1), Vol.25, No.3, Paper 604 (p.1-16). [DOI: 10.3390/s25030604]
(2024)
-
- (preprint) Development of the Grape Harvesting Robot Using a Multi-Step Detection Method Based on Ai and 3d Position Estimation Algorithm: Tomoki NOGUCHI, Liangliang YANG*, Yohei HOSHINO, Computers in Industry, (2024-3(投稿中)), Vol.**, No.***, p.**-****. [DOI: 10.2139/ssrn.4767109]
- Development of an EV Crawler-Type Weeding Robot for Organic Onion : Liangliang YANG*, Sota KAMATA, Yohei HOSHINO, Yufei LIU, Chiaki TOMIOKA, MDPI Agriculture (IF(2023)=3.3), (2025)(published 2024-12), Vol.15, No.1, Paper 15010002 (p.1-21). [DOI: 10.3390/agriculture15010002]
- Development of a Grape Cut Point Detection System Using Multi-Cameras for a Grape-Harvesting Robot: Liangliang YANG*, Tomoki NOGUCHI, Yohei HOSHINO, MDPI Sensors (IF(2023)=3.4), (2024-12), Vol.24, No.24, Paper 8035 (p.1-18). [DOI: 10.3390/s24248035]
- Development of a pumpkin fruits pick-and-place robot using an RGB-D camera and a YOLO based object detection AI model: Liangliang YANG*, Tomoki NOGUCHI, Yohei HOSHINO, Computers and Electronics in Agriculture (IF(2023)=7.7), (2024-11), Vol.227, Part 2, Paper 109625 (p.1-17). [DOI: 10.1016/j.compag.2024.109625]
- Development of an Automatic Harvester for Wine Grapes by Using Three-axis Linear Motion Mechanism Robot: Shota Sasaya, Liangliang Yang*, Yohei Hoshino, Tomoki Noguchi, MDPI AgriEngineering (IF(2023)=3.0), (2024-11), Vol.6, No.4, p.4203-4219. [DOI: 10.3390/agriengineering6040236]
- 氷との接触面積に着目したカーリングストーンの曲線軌跡形成メカニズムに関する検討: 河野義樹*, 星野洋平, 亀田貴雄, 日本機械学会論文集, (2024-2), Vol.90, No.930, p.23-00309. [DOI: 10.1299/transjsme.23-00309]
(2020)
-
- Development of a Low-Cost Semantic Monitoring System for Vineyards Using Autonomous Robots: Abhijeet Ravankar*, Ankit A. Ravankar, Michiko Watanabe, Yohei Hoshino, Arpit Rawankar, MDPI Agriculture(IF=2.072(2019)), (May-2020), Vol.10, No.5, Paper 182 (p.1-19). [DOI: 10.3390/agriculture10050182]
- Optimal design and simulation of a robot hand for a robot pumpkin harvesting system: Liangliang Yang*, Rongchang Tian, Qian Wang, Yohei Hoshino, Shuming Yang, Ying Cao, International Robotics & Automation Journal, (Apr-2020), Vol.6, No.1, pp.1-5. [DOI: 10.15406/iratj.2020.06.00196]
(2019)
-
- Generation of a High-Precision Digital Elevation Model for Fields in Mountain Regions Using RTK-GPS:Liangliang Yang*, Hao Guo, Shuming Yang, Yohei Hoshino, Soichiro Suzuki, Dehua Gao, Ying Cao, International Journal of Automation Technology, (2019-9), Vol.13, No.5, pp.671-678.[DOI: 10.20965/ijat.2019.p0671]
- ICT・AI・ロボット技術を活用した農業の自動化・省力化: 星野洋平*, Journal of Agricultural and Food Technology (グリーンテクノ情報), (2019), Vol.14, No.4, p.27-30.
(2016)
-
- Analysis of the skill of a world-class alpine ski racer by using a 3D CAD system: Soichiro SUZUKI, Daichi TAGUCHI, Yohei HOSHINO, Cao Ying and Lianlian YANG, The International Journal of Engineering and Science, (2016), Vol.5, No.11, pp.34-37.[link: http://www.theijes.com/Vol,5,Issue,11.html]
- 柔軟構造物用回転型アクティブ除振装置の動的量子化器による低コスト高性能化, Cost-performance enhancement of an active wheel damper for flexible structures by using the dynamic quantizer: 星野洋平, 安藤恭平, 鈴木聡一郎, 日本機械学会論文集, (2016-5), Vol.82, No.837, p.15-00652 (advance publication date: 12 May, 2016). [DOI: 10.1299/transjsme.15-00652]
- Uphill and level walking of a three-dimensional biped quasi-passive walking robot by torso control : Ying CAO, Soichiro SUZUKI and Yohei HOSHINO, Robotica, Vol.34, Issue 03, (2016-3), pp.483-496. [DOI: 10.1017/S0263574714001593]
(2015)
-
- Self-identification method of arrangement and effective pressure areas for a vibration-isolation table supported with a redundant number of pneumatic actuators: Yohei HOSHINO, Soichiro SUZUKI, Kenji TAKAGI, Yukinori KOBAYASHI, JSME Mechanical Engineering Journal, (2015-6), Vol. 2, No. 3, p.14-00552 (pp.1-11). [DOI: 10.1299/mej.14-00552]
(2014)
-
- Turn Control of a Three-Dimensional Quasi-Passive Walking Robot by Utilizing a Mechanical Oscillator : Ying CAO, Soichiro SUZUKI and Yohei HOSHINO, Engineering, Vol.6, No. 2 (2014), pp.93-99. [DOI: 10.4236/eng.2014.62013]
(2013)
-
- Force Redistribution Method for Compensating Actuator-Breakdown of Vibration-Isolation Tables Supported with a Redundant Number of Pneumatic Actuators (Translated Paper): Takumi MAEDA, Yohei HOSHINO, Daisuke YOSHIDA, Yukinori KOBAYASHI and Takanori EMARU, Journal of System Design and Dynamics, Vol. 7, No. 4 (2013), pp.355-366. [DOI: 10.1299/jsdd.7.355]
- アクチュエータ故障に対する冗長支持空気圧除振台の出力再分配法:前田拓巳, 星野洋平, 吉田大輔, 小林幸徳, 江丸貴紀, 日本機械学会論文集(C編), 79巻, 801号 (2013-5), pp.1317-1326. [DOI: 10.1299/kikaic.79.1317]
(2009)
-
- Skill Analysis of the Wrist Release in the Golf Swings Utilizing Shaft Elasticity: Soichiro SUZUKI, Yohei HOSHINO and Yukinori KOBAYASHI, Journal of System Design and Dynamics, Vol.3, No.1 (2009), pp.47-58. [DOI: 10.1299/jsdd.3.47]
(2007)
-
- Skill Analysis of the Wrist Turn in a Golf Swing to Utilize Shaft Elasticity: S. Suzuki, Y. Hoshino, Y. Kobayashi and M. Kazahaya, The Impact of Technology on Sport II (2007-9), pp.259-264. [ISBN : 978-0-415-45695-1]*
(2006)
- Investigation of Wrist Release during the Golf Swing by Using a Golf Swing Robot: Y. Hoshino, Y. Kobayashi and S. Suzuki, The Engineering of Sport 6: Developments in Sports (2006), pp.161-166. [DOI: 10.1007/978-0-387-46050-5_29]
 |
Sky Tech Sport Ski & Snowboard Simulator (SkyTechSport, Inc.) |
 |
VICONモーションキャプチャシステム (Vicon Motion Systems Ltd.) 床反力計測システム |
  |
小型農業用トラクター JB11XARFOSE (クボタ) |
| その他 |
|
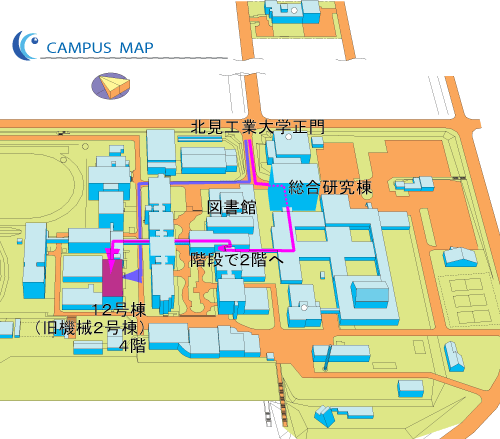
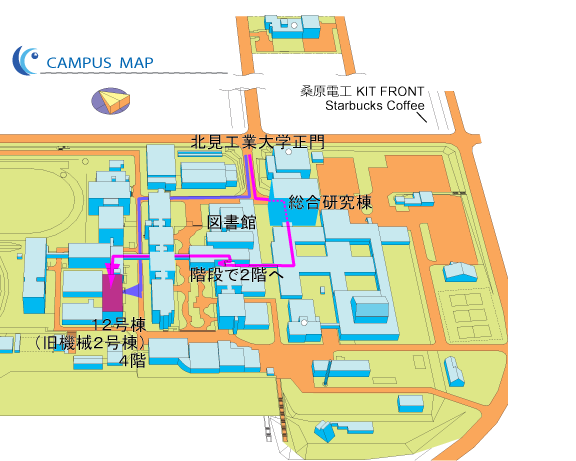
 (旧機械工学科2号棟) |
|
お問い合わせ
国立大学法人 北見工業大学〒090-8507 北海道北見市公園町165番地 1号館
Lab Address
165 Koen-cho, Kitami City, Hokkaido, Postal Code 090-8507, Japan
↑PAGE TOP